

ドローンは空中を自由自在に移動できますが、飛行時間が短いという欠点があります。
こまめに着地するならバッテリーを温存できますが、着地可能な地面も限られています。
そこでアメリカ・スタンフォード大学(Stanford University)機械工学科に所属するウィリアム・ロデリック氏ら研究チームは、トリのように枝につかまることができるドローンを開発しました。
新しいドローンにはハヤブサのような足があり、着地時の衝撃を吸収して「つかむ力」に変換できます。
研究の詳細は、12月1日付の科学誌『Science Robotics』に掲載されました。
目次
- ハヤブサの「枝をつかむ力」を模倣したドローン
- 本物のトリのように自然の中で効率よく働くことが可能
ハヤブサの「枝をつかむ力」を模倣したドローン

ハヤブサをヒントに開発されたドローン「SNAG:stereotyped nature-inspired aerial grasper」は、本物のトリのように足を使って離陸したり着陸したりできます。
通常のドローンは足場の悪い環境ではなかなか着陸できず、長期運用に向きません。
しかしトリの足がもつ「つかむ力」を再現することで、本物のトリのようにどこでも「休憩」できるのです。
SNAGの足は、3Dプリンタで作られた骨格、筋肉や腱の役割をもつモーターとワイヤーで構成されています。
そして、その足とかぎ爪が着地と同時に枝をしっかりとつかみます。
着地の衝撃を利用して、かぎ爪を動かすバネが作動。
着地エネルギーをそのまま「つかむ力」に変換できるため、エネルギー効率を高め、瞬時に木の枝をつかむことが可能なのです。
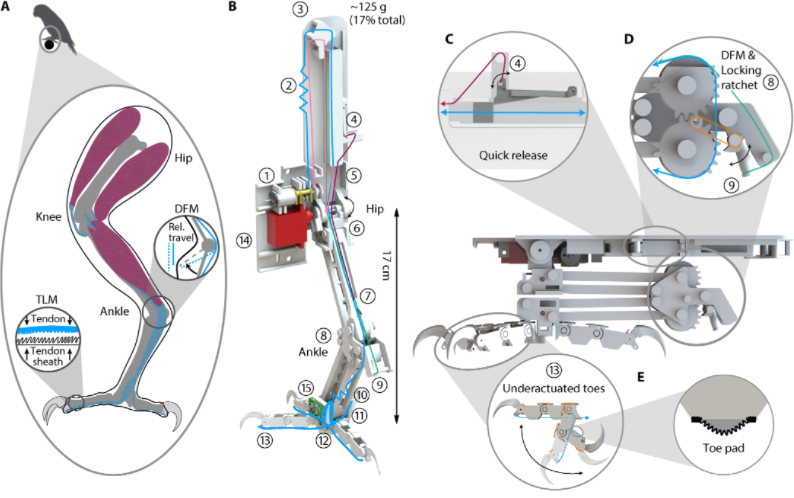
さらに、足には加速度センサーが搭載されています。
着地の衝撃を感知するとすぐに足首がロックされ、バランスアルゴリズムが作動。
これにより、逆さになったり落ちてしまったりせずに、木の上に留まれるのです。
本物のトリのように自然の中で効率よく働くことが可能
SNAGの「衝撃を吸収して枝をつかむ」仕組みは、いくつかの方法でテストされました。
実際に枝につかまることができるか実験するだけではありません。
胴体を固定した状態でテニスボールやお手玉を投げ、キャッチできるか確認したのです。
これらのテストで良好な結果を残したので、最後に森林でのテストを行いました。
チームによると、合計20回以上の試行錯誤の末、SNAGが完成したとのこと。
現段階でSNAGは、本物のトリのように森林の中を飛び回ったり、枝の上に留まったりできます。

どんな環境でも着地と飛行の使い分けが可能なので、従来のドローンよりもバッテリーを温存できるはずです。
また、物をつかんで特定の場所に運ぶことさえできるでしょう。
さらにカメラやセンサーを組み合わせるなら、森林の生態系のモニタリング、森林火災の防止、捜索・救助活動などの分野で活躍できるかもしれません。
今後チームは、状況認識や飛行制御など、着地するまでのプロセスに注目し、SNAGの能力を向上させていく予定です。
参考文献
Stanford engineers create perching bird-like robot
Meet SNAG: Tiny bird-inspired drone-robot hybrid can fly through the air before perching on branches – and could be used in search and rescue missions
https://www.dailymail.co.uk/sciencetech/article-10263591/Engineers-create-robotic-bird-grasp-branches.html?ns_mchannel=rss&ns_campaign=1490&ito=1490
元論文
Bird-inspired dynamic grasping and perching in arboreal environments
https://www.science.org/doi/10.1126/scirobotics.abj7562