
とうとうロボットはパルクールに挑戦します。
ロボットの研究開発を手掛ける米企業ボストン・ダイナミクス(Boston Dynamics)は、自社の人型ロボット「ATLAS(アトラス)」の能力を限界まで引き出し、複雑な障害物コースを駆け回る動画を公開しました。
ロボットは段差や隙間をジャンプで飛び越え、狭い平均台を器用に駆け抜けています。
その動画は驚きとともに猛烈な勢いで共有されていますが、ロボットがこんな器用な動作を獲得するには、人間同様に多くの失敗を積み重ねたトレーニングがあるのです。
目次
- 驚異の身体能力を発揮するヒューマノイドロボット
- 開発者とこだわりとATLASのトレーニング
驚異の身体能力を発揮するヒューマノイドロボット
もうすでに知っているという人も多いでしょうが、ボストン・ダイナミクス社は人型ロボットにパルクールをさせるという動画を公開しました。
まずは、話題になっている動画を見てもらうのが早いでしょう。
これはボストン・ダイナミクス本社の2階に設置されたコースで、1台目のロボットが土手状のベニヤ板を連続して駆け上がり、隙間を大ジャンプし、階段を駆け上がったり駆け降りたりしています。
2台目のロボットは平均台に飛び乗り、同じ手順を逆にたどった後、1台目のロボットが平均台を跳び越えて、再びその後を追っています。
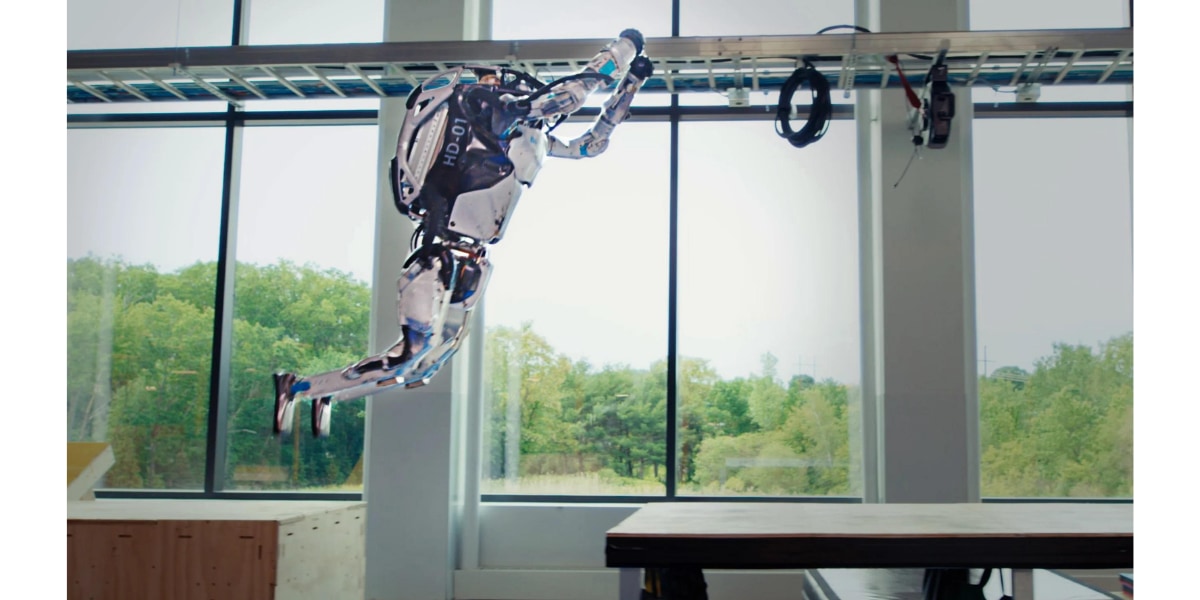
そして最後に、両者は完璧に同期した2回のバクフリップをやってのけました。
同じところを上から見たものが、次のGIFです。
華麗ににバックフリップを決め、少し低い狭い足場に見事に着地しています。
パルクールはフランスの軍事訓練から発生した移動動作を追求したスポーツです。
ロボットにバク転をさせたり、パルクールをさせることは、実際商業的にあまり役に立たないことかもしれません。
しかし、人型ロボットはあらゆる環境に対して、平均的な人間の成人と同じレベルで対応できるということを目指しています。
複雑な人型ロボットは、大きさとシステムの複雑さの組み合わせによって、重量に対する強度、動作時間、可動域、物理的な耐久性などで設計のトレードオフ関係が存在します。
あちらを立てればこちらが立たずということにもなるのです。
そうした中で、制御チームはさまざまな複雑な行動を実行するアルゴリズムを作らなければなりません。
これらを総合的にテストして、人型ロボットの限界を見極めるために、こうしたパルクールにロボットが挑戦するという実験が出てくるのです。
開発者とこだわりとATLASのトレーニング
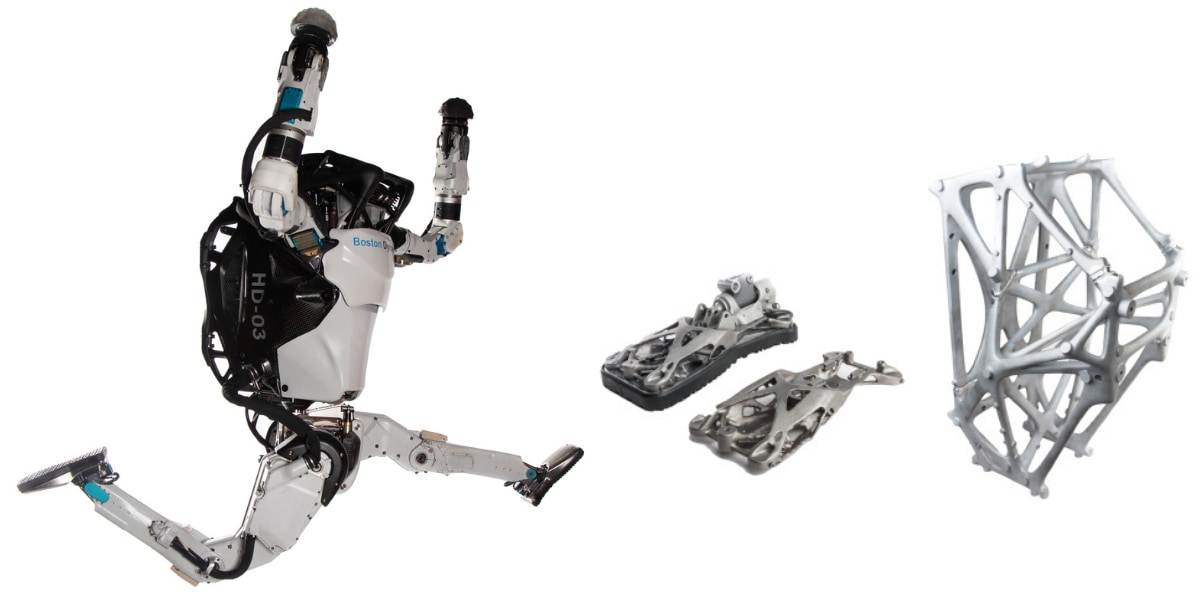
人型ロボットATLASは、世界でもっともコンパクトな携帯油圧システムを備えていて、28の油圧ジョイントによって優れた機動性を実現しています。
移動速度は1.5m/sで、俊敏に移動し、3Dプリントされた軽量なパーツで、跳躍や宙返りに必要な強度と重量の比率を実現しているそうです。
パルクールのコースをクリアするロボットの動作は、人間が実際に動きを試し、それを取り込んでアルゴリズムを設計し実現されていきます。
そして、実は今回の動画は、この日初めて、2台のロボットが障害物コースを完璧にクリアした姿なのだそうです。
つまり、それまでは失敗を繰り返していたわけです。
成功した超人的な動きだけ見ていると、飛んでもないロボットが登場したと思ってしまいますが、なんだかこうした失敗している姿を見ると親近感が湧きます。
ロボットも人間と同じように練習を繰り返し、トレーニングしてやっとあのスムーズな動きを獲得しているのです。
だからこそ、最後にコースを完璧にクリアしたあと、ガッツポーズを取っているわけです。

ポーズを組み込んだのはもちろん開発者ですが、ここにも開発者たちのこだわりがあるようです。
実は、AtlasチームリーダーであるScott Kuindersma氏によると、この単純な動作でほんのわずかなステップにミスがあったのだといいます。
「動画をよく見ると、ちょっと不格好ですよね。
少しぎこちない感じがしますが、これもテストしてきた動作を活かしてもっといいものにする自身があります」
動画を見ている人は気づかないと思いますが、開発チームはそんな細部の動作まで気を配り、正しい動作にしたいと考えているようです。
参考文献
LEAPS, BOUNDS, AND BACKFLIPS
https://blog.bostondynamics.com/atlas-leaps-bounds-and-backflips